Grasp to Act
Dextrous Grasping for Tool-Use In Dynamic Settings

🤖 Robots can grasp — but they can't keep a stable hold once dynamic forces (impact, torque, resistance) show up during tool-use 🛠️🪚
Our idea 💡: Start from a human-guided grasp optimization, then let RL adapt the fingers online 🔁 continuously correcting slip and rotation throughout the manipulation ✊
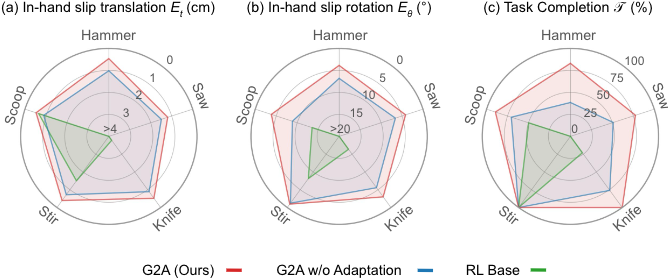
We tested our approach on five real-world tool-use tasks. We compare against 2 baselines in the real-world: RL Base which is an RL policy trained from scratch and G2A w/o adaptation which is without the residual RL module.
Click any task below to see it in action!
Our approach produces grasps that are extremely robust to random perturbations during task execution, maintaining stability even under unexpected disturbances.